錨桿鉆車自動錨護系統
--自動行走、方向糾偏、自動錨護、平行作業
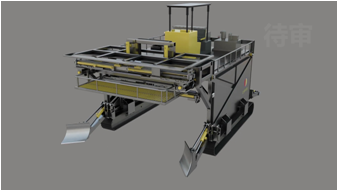
該錨桿鉆車為我司自主研發設計的一款自動化程度較高的錨護設備,其獨特的門型結構,實現了跨掘進機作業。解決了小巷道無法使用大型錨護設備的問題。
該鉆車需與無人駕駛掘進機配套使用,最終實現綜掘面成套設備的自動化控制,實現了掘、錨護平行作業。
錨桿鉆車控制系統
該系統主要由“錨桿鉆車電控系統”、“錨桿鉆車主體系統”及“傳感器系統”三部分組成,通過采集、分析各傳感器信號,按照內置算法,進行姿態調整、自動行進后退、自動錨護等一系列作業動作。
錨桿鉆車設計有一套獨立的電控系統,錨桿鉆車控制器通過無線方式與掘進機PLC進行通訊、收發數據,同時還可采集錨桿鉆車各傳感器信號,通過內置算法進行分析,控制錨桿鉆車液壓系統,實現錨桿鉆車的前進、后退、位姿定位、方向糾偏、自動錨護等工作。